ONE OPERATOR, MULTIPLE UGVs
Enabling multi-UGV control by a single operator.
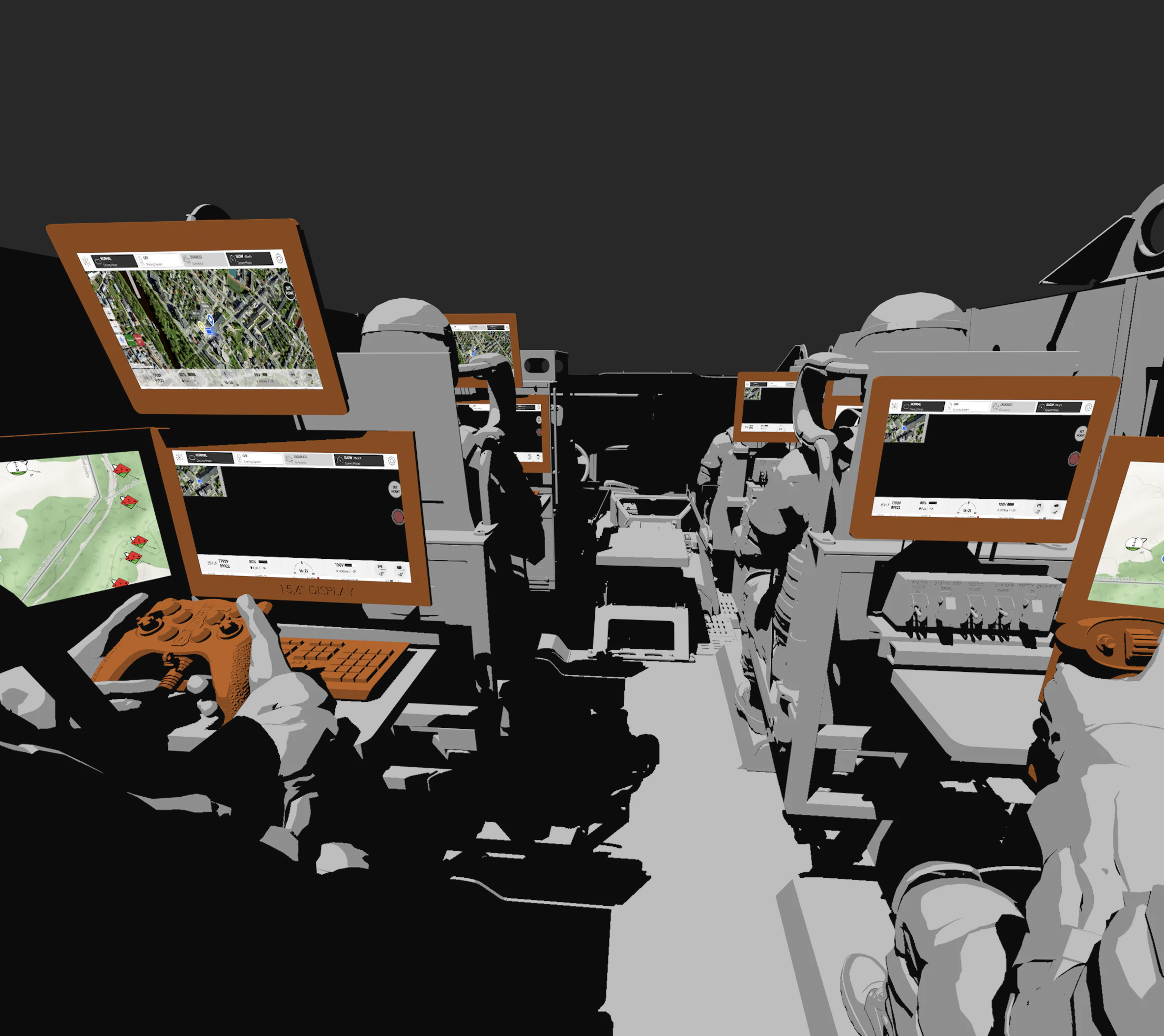
ARCOS (Autonomous & Robotic Control Suite) is a modular command-and-coordination layer that integrates with existing C2/BMS systems to manage multiple UGVs and their payloads through a dedicated, operator-focused interface.
/01
Units operating fleets of robotic vehicles that require seamless platform switching, improved situational awareness, and more effective mission execution.
/02
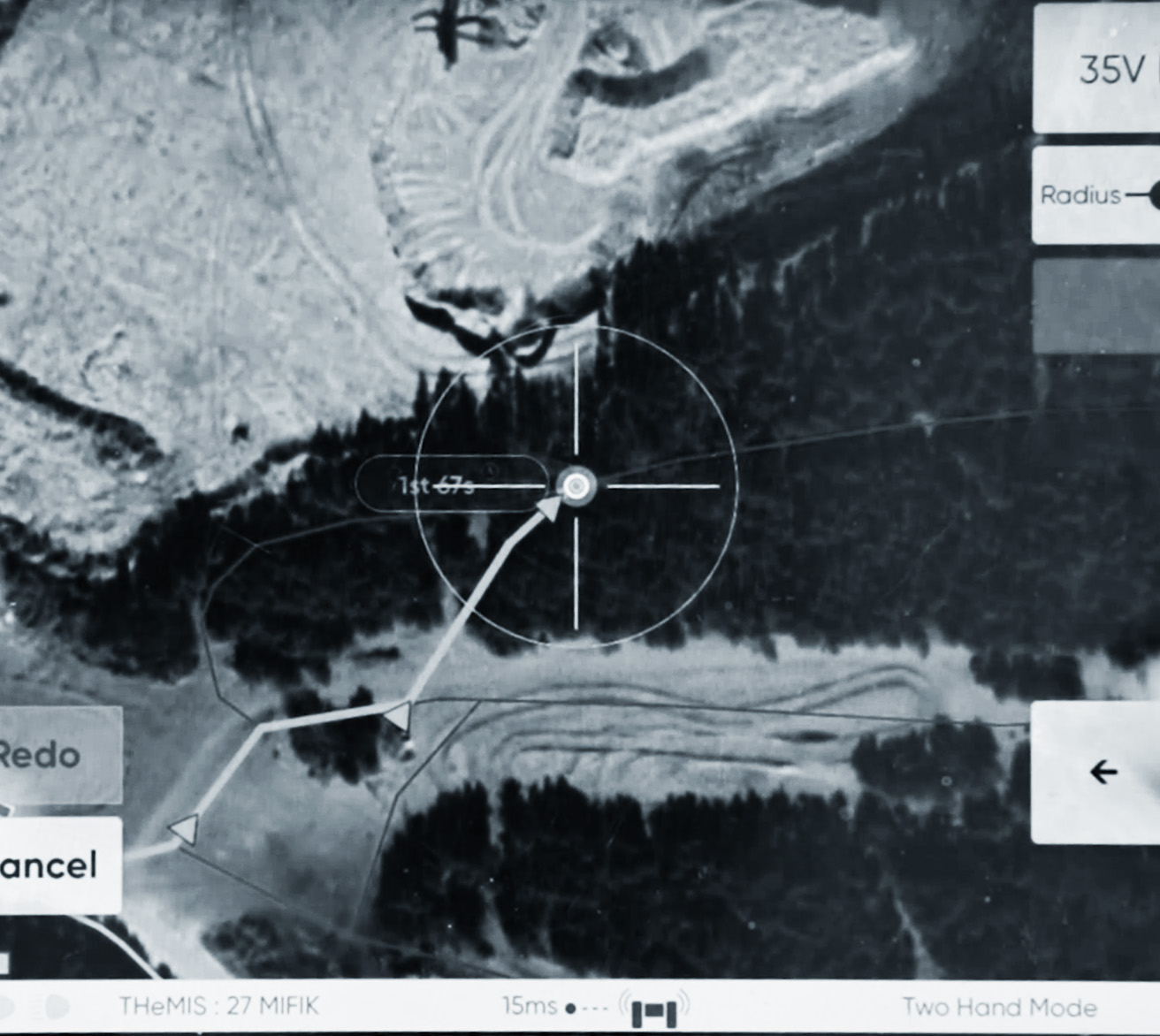
Real-time visualisation of UGVs and payloads throughout the fleet.
Asset management and centralised field observations.
Planning and coordinating missions across units.
Map customisation and management.
BMS data filtering and organisation.
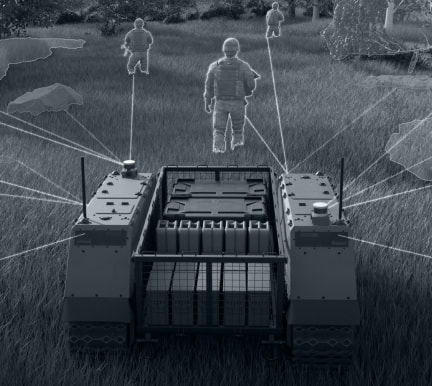
Manned-unmanned teaming (MUM-T).
Rapid setup and deployment.
/03
Serves as a comprehensive suite offering full access to all systems in the UGV fleet and seamlessly integrates that information with the current BMS/C2.
Focuses on two main areas:
Fleet and mission management for enhanced multi-asset control and execution.
User interaction systems with intuitive, customisable user interfaces tailored to operator needs.
By enhancing situational awareness, optimizing the use of autonomy, and improving overall mission effectiveness, ARCOS ensures seamless management of unmanned systems.
Its unified interface, across integrated systems, supports manned-unmanned teaming (MUM-T), enabling effective collaboration between human operators, autonomous functions and robotic assets.
Enabling multi-UGV control by a single operator.
Quick startup, immediate visibility, and rapid retasking between UGVs and operators
Providing only essential information reduces cognitive load and enhances awareness.
Features built-in redundancy and operator handover options among different roles.
Compliments existing C2 ecosystems without disrupting workflows.